TriSonica微型三维超声风速和气象传感器测量火灾前沿的湍流
“大多数人都会忽略火灾行为的一个特征,即风垂直剖面的变异会导致不稳定的火灾行为,”圣何塞州立大学野火跨学科研究中心火灾研究实验室的教授克雷格·克莱门茨博士说,“如果有很强的风切变,比如一阵风从某个方向吹向地表,同时在上层吹过一股相反方向的风,便会产生不稳定的火灾行为。”
通常情况下,火灾研究人员将传感器安装在高塔或系绳式的探空气球上来捕获垂直风廓线。然而,在不断变化的野火环境中,在火线附近布设高塔或运输部署气球,是一个不现实的选择。
“探空气球可以有效的帮助研究人员测量空气温度和风廓线,”克莱门茨博士补充道,“然而,探空气球操作比较麻烦,需要准备气球、氦气、系绳、绞盘等,所有工作都只是为了将携带传感器套件的探空气球放入大气层。这种方式是常见测量风廓线的方法,但是它在活跃的火灾区作用不大。无人机系统已证明是科学家在火灾环境中进行气象剖面分析的可靠且易于部署的研究平台,既经济又有效。”
在克莱门茨博士的指导下,火灾天气研究实验室一直在使用无人驾驶飞机系统(UAS)或被称为无人驾驶飞行器(UAV)或无人机,对野火进行气象剖析。他们的研究表明,配备三维超声风速计的无人机系统可以有效地测量大气变量的垂直剖面,可代替气象塔的测量,应用于火灾环境的采样。
马修·布鲁尔是火灾天气研究实验室的研究生研究助理,他协助克莱门茨博士进行了这项研究。在该项目中,布鲁尔发挥着重要的作用,由他驾驶无人机系统进行这一系列的野火研究。
“我一直认为无人机系统非常适合大气科学,尤其是高分辨率采样,”布鲁尔说,“我的这种想法和对火灾天气及下坡风暴等方面的研究兴趣与克莱门茨博士的研究目标是相一致的,这也是我进入圣何塞州立大学的原因。事实证明这是一个非常独特的机会,我不会再去任何其他地方。”
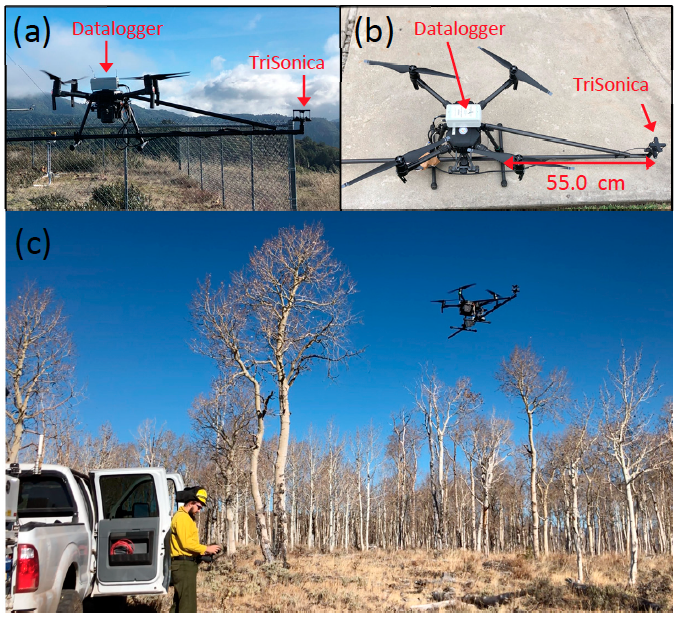
该团队与美国林业局(USFS)和美国沙漠研究所(DRI)合作,将一个TriSonica® 微型三维超声风速仪和气象传感器(图1)固定在大疆Matrice 200无人机(M200)上,对野火产生的三维风的垂直风廓线进行采样。
大疆M200四轴飞行器是一款成熟的商用飞行平台,具有易用性和避障功能等特点。TriSonica微型三维超声风速和气象传感器可测量三维风速(u、v 和 w)、风向、温度、湿度、气压、航向和倾斜角等,输出频率最高可达40Hz。克莱门茨博士补充道:“该传感器非常适合无人机平台,因为它可以输出磁航向和倾斜角,同时重量不到50克。TriSonica微型三维超声风速和气象传感器最酷的地方在于它可以自动校正。它有一个惯性测量单元 (IMU),因此它会自动校正俯仰和侧倾。这真是太棒了!”
传感器的固定位置至关重要。如果离螺旋桨太近,则螺旋桨转动可能会干扰数据。该团队看到了一个美国海军学院和乔治华盛顿大学的研究人员驾驶的八轴飞行器的照片,其中TriSonica微型三维超声风速和气象传感器被安装在延伸到无人机平台侧面的吊杆上。参考这种设计,该团队开始测试传感器的固定位置,以尽量减少螺旋桨转动对数据产生的影响。
“我们将传感器布设到侧面的部分原因是为了获得垂直速度,”克莱门茨博士解释道,“部署三维超声风速仪的目的是为了充分发挥该设备的微气象测量的功能,用于获取垂直风速(W),同时我们确定最佳测量位置是在无人机下方的吊杆上。
传感器固定在四轴飞行器的侧面具有另一个好处:因为飞行平台可以随风旋转,使螺旋桨位于传感器的下风处,从而减少对传感器的干扰。经过多次测试,该团队确定将传感器固定在距离无人机主体约55厘米处(螺旋桨宽度的两倍)。因为安装到更远的位置,会导致整个平台不稳定。同时,该团队将数据记录器安装到无人机的顶部,并使用集成到无人机面板的5V USB端口为其供电。
该团队操控无人机多次飞过一个塔装的三维超声风速仪(R.M. Young(RMY)81000),该风速仪使用Campbell Scientific的CR1000数据采集器记录数据,从而用于评估TriSonica传感器的准确性和偏差。克莱门茨博士指出: “在低风速测试中,与RMY相比,UAS的测量表现非常出色,两者没有显著差异。” 在中风速测试中,与RMY相比,UAS测量的风速数据中总体有0.5 m/s的正偏差。克莱门茨解释道,这种偏差并不是恒定的,有时也会出现UAS比RMY小1 m/s。同时,他们的研究表明,当两种风速计相邻安装时,两者的偏差较小,且相对RMY而言,TriSonica传感器可以更为准确的测量温度。
当提及TriSonica微型三维超声风速和气象传感器时,克莱门茨博士补充道:“它真的很便宜,做工优良且价格合理,测量准确且易于集成到无人机或塔台平台上。当我得知史蒂夫·奥斯本之前是我最喜欢的ATI的三维超声风速仪的设计师时,我就想,哦,太酷了。我仍然在使用ATI的风速仪,并且我又买了两个SX型号的探头。TriSonica微型三维超声风速和气象传感器和ATI的设备的科学机理相似,我认为它们是目前最好超声传感器。这对我来说也很重要。”
克莱门茨博士和他的团队利用受控实验和人为火灾测试,以及在实验环境中获取的数据,测量与火锋有关的气象和湍流数据。这项研究为认识火灾行为提供了一个高质量的数据集,包括火灾蔓延速度和烟雾传输速度。该研究发现,在受控的野火中使用无人机系统不仅是可行的,而且还为在大型野火中使用无人机系统奠定了基础。
该研究表明,在野火中使用无人机系统可以改进目前可用于监测火灾环境的仪器。捕获的数据可用于计算各种火灾天气指数,为火灾行为和烟雾扩散提供指导。他们证明,他们的UAS平台能够进行高分辨率探测,揭示小尺度的温度和风结构。由于上升速度太快,无线电探空仪往往可能会忽略或平滑这些观测结果。
“利用无人机系统,我们能够观测到真正靠近火锋的风场的演变,”布鲁尔说,“通常情况下,想要获取这些数据,可能会损坏大量的设备。然而,通过无人机系统,我们可以轻松收集大量关于火锋通过如何影响风和温度的数据。因为它是一个移动平台,我们可以 重复这个过程,飞到火锋前面,让火燃烧通过,收集数据,然后再飞出去,不断重复。利用该移动平台,我们能够在火线的前进过程中,不断收集大量观测结果,这是单次观察无法实现的。”
虽然目前的无人机系统能够满足大气环境监测和类似气象站的观测等方面应用,但是提供的风速和温度读数精度不高,分别是±1m/s和 0.5 °C。克莱门茨博士指出,“无人机平台存在一定的误差(1 m/s或更大),这导致很难确定风的变化是由火灾产生的环流引起的,还是由飞行平台的结构干扰或飞行移动引起的。”
克莱门茨博士和他的团队仍然乐观地认为,未来持续的研究将进一步证明无人机系统是一个可行的选择,不仅能够应用于量化野火事件期间火灾天气条件,而且能够用于火灾与大气交互的研究。
“目前,我们是美国仅有的一只可以派遣监测活跃野火的团队,” 克莱门茨说,“我们被列为国家资源,因此我们可以随时被调用。我设想有一天我们将部署我们所有的资产:两辆卡车(一辆装有雷达,一辆装有激光雷达)、气象气球系统、地面天气系统和无人机,从而绘制一张完整的野火环境图景。
“传感器布设到侧面的部分原因是为了获得垂直速度,”克莱门茨博士解释道,“部署三维超声风速仪的目的是为了充分发挥该设备的微气象测量的功能,用于获取垂直风速(W),同时我们确定最佳测量位置是在无人机下方的吊杆上。